번역이 조금 매끄럽지 못해도 양해부탁드립니다~^^
초록
본 논문은 초음파 센서와 카메라의 부족을 극복하기 위해 HDL-32E LiDAR을 이용한 자율주행차 기반 자율주차 방식을 제안했다. 먼저 3-D 포인트 클라우드 데이터가 사전 처리되었다. 그리고 나서 우리는 차량의 동적 이론에 따라 주차 공간의 최소 크기를 계산했다. 둘째, 빠르게 탐색되는 랜덤 트리 알고리즘(RRT) 알고리즘은 자율 주행 특성에 기초하여 두 가지 측면에서 개선되었다. 그리고 우리는 차량의 역동성과 충돌 제약에 기초하여 주차 경로를 계산했습니다. 또한 속도의 안정성을 실현하기 위해 퍼지 논리 컨트롤러를 사용하여 브레이크와 가속기를 제어했다. 마침내 실험은 자율주행차로 진행되었고, 결과는 제안된 자동 주차 시스템이 실현 가능하고 효과적이라는 것을 보여준다.
1. 서론
자율주행차는 현재 뜨거운 연구 분야이다. 그리고 자율 주행 차량의 중요한 부분인 자동 주차는 점점 더 많은 연구자들에 의해 우려되어 왔다. 게다가, 자동차의 수가 증가함에 따라, 주차는 점점 더 어려운 문제가 되고 있다. 이 경우 자동주차는 우리 생활에 없어서는 안 될 부분이다.
자동 주차 시스템은 대상 위치 지정, 경로 계획 및 주차 안내로 구성된다(왕, 송 외 2014). 스캐닝 레이저 레이더(정, 초 외 2008), 초음파 센서(파크, 킴 외 2008), 쌍안경(Kaempchen, Franke 외 2002)은 외부 인지 정보를 수집하고 주차 지점을 식별하는 데 사용된다. 하지만 초음파 센서는 주차장의 양쪽이 비어 있고 카메라 사용 시 사각지대가 많은 상황에 적응하지 못한다. 자동 주차의 효율성을 향상시키기 위해, 우리는 주차 장소를 감지하기 위해 HDL-32 LiDAR을 선택했다.
경로 계획 및 제어에는 주로 두 가지 범주가 있다(Marouf, Pollard et al. 2014). 하나는 자동 주차 제어기로 인간 운전자의 주차 기술을 이전하기 위한 퍼지 논리(Laugier and Paromtchik 1996)에 기초한다. 야난 자오는 스키드 스티어링 자율 지상 차량(Zhao 및 Jr 2005)의 키네마틱 모델을 사용하여 새로운 퍼지 논리 컨트롤러를 설계했다. 그리고 양시성은 퍼지 논리 제어 방법을 고안했다. 계층적 제어와 가변적 우주(Yang and You 2010)를 결합했다. 그러나 이런 식으로 모델화하는 것은 어렵다.
다른 하나는 실현 가능한 형상 경로를 미리 계획하기 위한 차량의 역학과 제약을 기반으로 한 다음 기준 경로를 따르도록 차량을 제어한다(Min 및 Choi 2013). Inoue는 조향 각도와 주행 속도에 대한 제어 법칙으로 구성된 경로 계획 방법을 제안했다(Liu, Dao et al. 2005). JinZe Song은 미분 평면 이론과 스플라인 이론(노래 2009)을 기반으로 충돌 없는 공간을 생성하는 방법을 제안했다. 이 접근 방식은 속도와 방향에 대한 높은 제어 정밀도를 필요로 한다. 그리고 자율주행차에 적용하는 것이 더 적절하다.
이 논문에서 우리는 두 번째 방법을 선택한다. 그리고 주차 경로를 계획하는 RRT 알고리즘을 증명했다.
2. 전처리 및 계산
효율성을 높이기 위해서는 데이터의 양이 많기 때문에 3-D 클라우드 데이터의 사전 처리와 세분화가 필요하다. 우리는 정지된 자동차의 기하학적 특징을 인식하여 사용 가능한 주차 공간 정보를 추출했다.
2.1 데이터 사전 처리
중국에서, 교통은 도로의 오른쪽에 있습니다. 차 오른쪽에 주차할 곳을 찾아야 한다. 그리고 왼쪽에 있는 장애물 정보는 주차 경로를 제한하는 데 사용된다. 그러나, 먼 곳의 데이터는 정보 추출 과정을 방해하고 시간과 비용을 증가시킬 것이다. 이러한 이유로 관심 영역(ROI)을 정의했다. LiDAR의 좌우 거리는 8m, 10m, LiDAR의 앞뒤 거리는 16m, 8m이다.
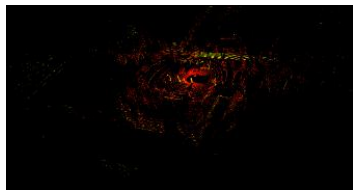
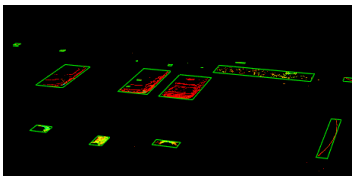
우리는 주차된 차들의 정보와 장애물에 대해 신경을 쓴다. 지반 데이터와 나무의 점 데이터는 우리에게 쓸모가 없다. LiDAR에서 지면까지의 거리는 2m이다. 그리고 나무는 LiDAR보다 키가 큽니다. 따라서 스루 필터는 -2m<z<0m> 데이터를 보존하는 데 사용됩니다. 주차된 차와 장애물 사이에는 안전한 거리가 존재한다. 이 기능을 기반으로 유클리드 클러스터를 적용하여 주차된 자동차와 장애물을 추출한다. 마침내 우리는 데이터를 XOY 평면에 투영하고 최소 경계 직사각형(MBR)으로 대체했다. 그림 1(a)은 원래의 3D 포인트 클라우드를 보여줍니다. 그림 1(b)은 추출된 ROI를 나타냅니다. 유클리드 군집의 결과는 그림 1(c)에 의해 묘사된다. 그림 1(d)은 주차된 차량과 장애물의 MBR을 보여줍니다.
MBR이 주차장의 최소 크기와 비교하여 주차 면적을 결정할 수 있다.


2.2 주차 지점 계산
2.2.1 최소 평행 주차 공간 계산:
본 논문에서는 주차는 주차 공간에 주차한 후 자율 주행 차량이 원래 트랙에 따라 주차 공간을 벗어날 수 있다는 것을 의미하는 가역적 프로세스이다. 최소 주차 공간의 크기는 운동학적 제약 조건 및 차량 충돌 제한에 의해 결정된다.
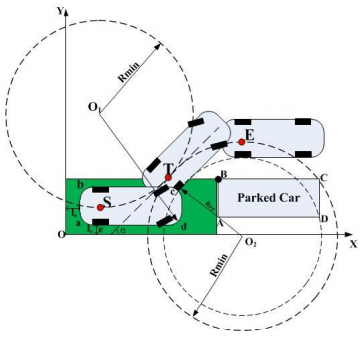
그림 2는 평행 주차의 스케치를 보여줍니다. 포인트 bcd는 자율차를 나타내고, ABCD는 주차된 차를 나타낸다. S 지점은 리어 액슬의 중앙에 위치한다. 자율 주행 차량의 전진 방향이 X축 중심으로 45°일 때 후방 차축의 또 다른 중심은 T이다. 그리고 E는 차가 X축에 평행할 때 점이다. 따라서 곡선 STE는 차량 abcd의 트랙을 의미한다. 차량이 선로 STE에 따라 주차장을 벗어나면 B 지점에서 차량 ABCD와 충돌한다. B의 좌표는 평행 주차의 최소 치수의 길이 𝑝와 폭 𝑝과 같다.
그래서 최소 평행 주차장의 크기는 다음에 의해 추출될 수 있다.
다음 공식:

𝑊 = the width of the vehicle
𝐿 = The length of the vehicle
𝐿𝑟𝑜 = Front overhang 𝐿𝑓𝑜 = Rear overhang
𝑅𝑚𝑖𝑛 = Minimum turn radius of vehicle
𝐿𝑤𝑏 = wheelbase 𝐿𝑓 = Front gauge
𝐿𝑟 = Rear gauge
𝑙𝑠 = Safe distance between vehicle and the boundary of parking spot
2.2.2 최소 수직 주차 공간 계산:
직각 주차는 주차 지점 앞의 공간에 따라 두 가지 상황으로 나눌 수 있다. 그림 3(a)는 주차 공간이 충분한 상황을 보여준다. 최소 수직 주차 지점의 크기는 다음 공식으로 추출할 수 있다.

그리고 그림 3(b)는 불충분한 주차 공간 상황을 나타낸다. 이 경우 충돌 제한 조건은 다음과 같이 설명할 수 있습니다. 차량이 주차 지점을 벗어나면 우측 리어 휠이 B 지점에서 주차된 차량과 충돌하고, 좌측 리어 휠이 C 지점에서 주차된 차량과 충돌합니다.
이 경우 다음 공식을 사용할 수 있습니다.



3. 경로 계획
급속 탐색 랜덤 트리(RRT)는 일반적으로 로봇 경로 계획에 적용되는 빠르고 확률적인 알고리즘이다(Lavalle 및 Kuffner 2002). 기본 RRT 알고리즘은 처음에는 임의 트리를 전역 공간에 빌드한 다음 임의 트리에서 경로를 계획된 경로로 선택한다. 이렇게 하면 미지의 영역을 효과적으로 탐색할 수 있다. 그러나 이 알고리즘의 효율성은 낮다. 본 논문에서는 자율주행차의 이동 특성을 기반으로 개선하였다.
그림 4와 같이, 본 논문은 두 가지 측면에서 RRT 알고리즘(Kalisiak and Panne 2006)을 개선했다. 최대 회전각 βmax = 70°는 새로운 무작위 포인트의 공간을 제약하는 데 사용된다. 랜덤 점과 목표 점 사이의 거리는 랜덤 점 대 목표 점의 접근 속도를 향상시키기 위한 기준 요인이다. 이외에도 자율주행차와 신형 랜덤닷의 장애물 간 충돌 감지 이전에 새로운 랜덤닷에서 자율주행차의 고도화 방향을 획득할 필요가 있다. 다음 공식이 묘사한 것처럼, 차량의 새로운 방향은 초기 값과 초기 지점에서 새로운 무작위 지점까지의 값 사이의 평균값이다.


3.1 평행주차의 경로계획
자율주행차는 유효 주차장을 감지한 뒤 출발점을 찾아 주차장으로 진입해야 한다. 자동차가 출발 지점까지 운전할 때, 차체는 주차 지점의 긴 면과 평행한 다음, 두 개의 호를 따라 그 지점에 주차하기 시작해야 하며, 그 다음에 두 개의 최소 회전 반경이 있어야 한다.
그림 5와 같이 E는 출발점이고 S는 주차 지점이다. S 및 E의 좌표는 다음과 같이 설명할 수 있다.

올바른 위치에 오르기 위해서는 출발지에서 L을 추가해야 한다. 따라서 시작점의 좌표는 (√2𝑅𝑚𝑖𝑛 + 𝑥𝑆 + 𝐿,𝑊𝑝 + 𝑦𝑆)이다.
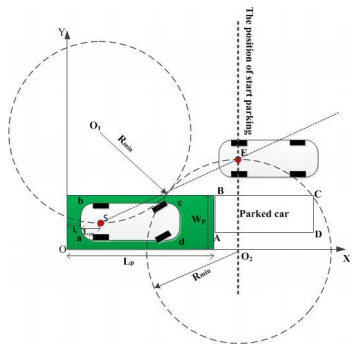
그림 6은 개선된 RRT 알고리즘으로 계획된 주차 경로를 보여준다. 흰색 점은 접근 가능한 경로를 나타내며, 노란색 점은 시작 지점과 주차 지점을 나타낸다.

3.2 직각주차의 경로계획
그림 7과 같이 𝑅𝑟𝑟 is는 궤도의 반지름이다. 𝐿𝑧은 주차장에 주차하는 직선거리를 말한다. 시작점, 주차점 및 𝐿𝑧의 좌표는 다음과 같이 설명할 수 있다.

또한 올바른 위치에 진입하기 위한 공간을 늘리기 위해 L을 추가한다. 따라서 시작점의 좌표는 (𝑅𝑛 + 𝑥 + 𝐿 + 𝐿, 𝑊 + 𝑦)이다.

그림 8은 수직 주차의 계획된 주차 경로를 보여준다.

4. 제어
자율적인 차량 안정성 속도를 제어하기 위해 퍼지 논리 제어기(Zhao 및 Jr 2005)는 브레이크와 가속기를 제어하도록 설계되었다.
4.1 브레이크의 퍼지 논리 제어기
전류와 예상 속도 사이의 가속도 및 속도 차이는 퍼지 논리 제어기의 입력 변수이다. 그리고 두 변수는 사다리꼴 멤버십 함수에 의해 퍼지된다.
이 논문에서는 브레이크의 출력 데이터를 직관적으로 얻기 위해 선그노 모델을 사용한다. 복잡한 시스템의 동적 특성을 표현하기 편리한 비선형 모델입니다. 브레이크의 규칙 기반은 표 2에 나와 있습니다. 그림 9는 브레이크의 특정 출력 데이터를 나타낸다.

NS= negative small; M= middle PS= positive small;
PB= positive big N= Negative;
P= positive S= small; MS= middle small
MB= middle big; B= big

4.2 가속기의 퍼지 논리 제어기:
가속기의 멤버십 기능은 브레이크와 다르다. 가속기의 규칙 기반은 표 3에 나와 있습니다. 그림 10은 액셀러레이터의 특정 출력 데이터를 보여준다.

NB= Negative big; NS= Negative small
M= middle; PS= positive small
N= Negative; P= positive S= small;
MS =middle small MB= middle big;
B= big

5. 실험 구현
이 알고리즘은 우한대학교의 투지(TuZhi) 자율주행차에서 구현되었다. 차량에는 벨로딘-32E, GPS, IMU 및 휠 인코더 등을 포함한 센서 제품군이 장착되어 있다.
5.1 평행주차 실험
그림 11은 평행 주차의 처리를 보여준다. 그림 11(a)는 효율적인 주차 공간을 감지한 후 차량의 위치를 나타낸다. 그리고 주차된 자동차의 자세에 의해 평행 주차와 직각 주차 사이의 상황을 추론했다. 그림 11(b)에 표시된 차량의 위치는 출발 주차 지점이다. 그림 11(c)는 자율주차의 과정을 보여준다. 그림 11(d)는 차량이 주차 위치에 정지한 것을 나타낸다.


그림 12는 주차의 실제 경로와 계획된 경로(녹색)의 오류를 나타내며, 빨간색 곡선은 계획된 경로이다. 그림 13에서 최대 오차는 약 10cm이고, 주차 위치에 정지했을 때 최종 오차는 약 5cm임을 알 수 있다. 그림 14는 차량의 실제 속도와 지정된 속도 사이의 차이를 나타낸다.



5.2 수직주차 실험
그림 15는 수직 주차의 처리를 보여준다. 그것은 평행 주차와 비슷하다. 자율주행차 주차를 위해서는 30대가 필요하다는 결과가 나왔다. 그리고 실제 및 계획된 수직 주차 경로(녹색)의 오차는 그림 16에 나타나 있다. 그림 17과 18은 오류와 속도의 차이를 보여줍니다.





6. 결론
본 논문은 자율주행차 기반의 자동 주차 시스템을 제안했다. 시동 및 주차 지점은 차량 다이내믹 모델을 기반으로 계산되었습니다. 또한 주차 경로를 계획하기 위해 RRT 알고리즘을 개선했다. 또한 두 개의 퍼지 논리 제어기는 속도의 안정성을 실현하기 위해 브레이크와 가속기를 제어하도록 설계되었다. 이 결과를 통해 자동 시스템이 자율주행차를 안전하고 빠르게 주차할 수 있음을 알 수 있다.
향후 연구는 다음을 포함한다:
1) 환경 인식 능력을 향상시키기 위해 LiDAR의 거의 맹목적인 영역을 제거한다.
2) 흰색 주차선을 인식할 수 있는 카메라 데이터를 추가하여 주차 감지 능력 향상
REFERENCES
Wang, W., et al, 2014. Automatic parking of vehicles: A review of literatures. International Journal of Automotive Technology 15(6), pp. 967-978.
Jung, H. G., et al, 2008. Scanning Laser Radar-Based Target Position Designation for Parking Aid System.
IEEE Transactions on Intelligent Transportation Systems 9(3), pp. 406-424.
Park, W. J., et al, 2008. Parking space detection using ultrasonic sensor in parking assistance system. Intelligent Vehicles Symposium. pp. 1039-1044. IEEE.
Kaempchen, N., et al, 2002. Stereo vision based pose estimation of parking lots using 3D vehicle models. Intelligent Vehicle Symposium. pp.459-464. IEEE.
Marouf, M., et al, 2014 Automatic parallel parking and platooning to redistribute electric vehicles in a car-sharing application. Intelligent Vehicles Symposium Proceedings. pp.486-491. IEEE.
Laugier, C. and I. E. Paromtchik, 1996. Autonomous parallel parking of a nonholonomic vehicle. Intelligent Vehicles Symposium, 1996. pp.13 - 18. IEEE.
Zhao, Y. and E. G. C. Jr, 2005. Robust automatic parallel parking in tight spaces via fuzzy logic. Robotics & Autonomous Systems 51(2). pp. 111-127.
Yang, X. and F. You, 2010. Hierarchical Variable Universe Fuzzy Controller for Truck Backer Upper Problem. Fuzzy Systems and Mathematics 24(2). pp. 152-156.
Min, K. and J. Choi, 2013. A Control System for Autonomous Vehicle. Valet Parking. pp. 1714-1717.
Liu, K. Z., et al, 2005. Theory and experiments on automatic parking systems. Control, Automation. Robotics and Vision Conference, 2004. pp. 861-866 Vol. 2.
Song, J, 2009. The key technical research of autonomous parking system. National University of Defense Technology. 38(2). pp. 225-228.
Lavalle, S. M. and J. J. Kuffner, 2002. Report on the International Conference on Robotics and Automation Workshop. "Randomized kinodynamic planning". Vol.1, pp.473-479. IEEE.
Kalisiak, M. and M. V. D. Panne, 2006. Report on the International Conference on Robotics and Automation Workshop. "RRT-blossom: RRT with a local flood-fill behavior". pp.1237- 1242. IEEE.
'프로그래밍 > 논문 번역' 카테고리의 다른 글
| MU-Net: Deep Learning-based Thermal IR Image Estimation from RGB Image 번역 (0) | 2021.05.12 |
|---|---|
| Deep Convolutional Neural Network-based Fusion of RGB and IR Images in Marine Environment 번역 (0) | 2021.05.11 |


댓글